 |
Dr. Norbert Cheung's personal web site --- www.norbert.idv.hk--- |
| Home / Experience / Publications / Teachings / AudioVisuals / MyPage |
BEng - Automatic Control Theory - 自动控制原理 - SZU1101980036
Subject Information 课程教学大纲 <click here> <language arrangement> Video Resource - <Baidu Link>
Important Notice:
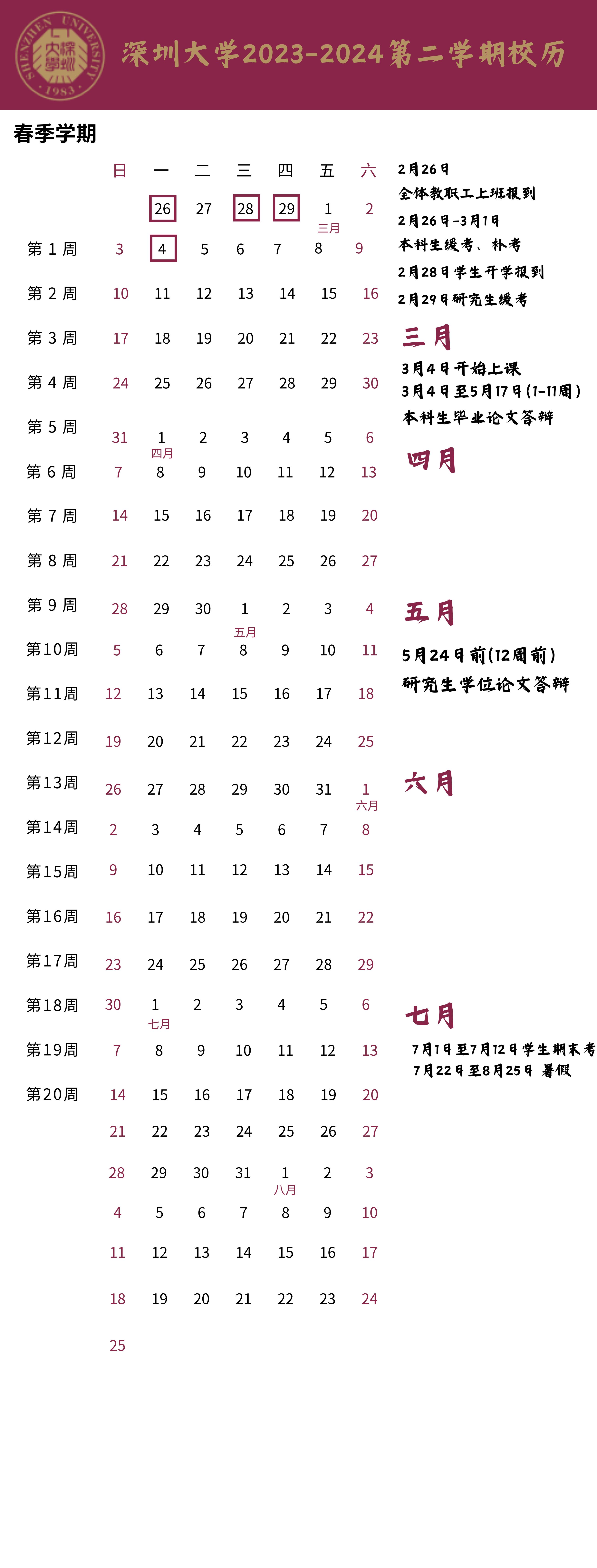
2024-5-25- 考試安排: (1) 补充资料将分发给考试学生。内容: (1)
中英词汇; (2) 重要公式列表; (3) 参考列表。 2024-5-26 - 最後一課堂將會重溫一次, 所有課堂的重點。各同學請盡量出席。
Teaching
Schedule Wk 1 - Introduction to Control Systems <notes> <tutorial> <solution> Wk 2 - Differential Equation and Laplace Transform <notes> <tutorial> <solution> Wk 3 – Mathematical Modelling and System Block Diagrams <notes> <tutorial> <solution>
Wk 5 – Test 1 -2024/04/07(Sun) - <arrangement> <questions> <solution> Wk 6 – System Modeling <notes> <tutorial> <solution>
Wk 8 – Root Locus Plot (Friday April 26th) <notes> <tutorial> <solution> Wk 9 – Bode Plot (Sunday April 28th) <notes> <tutorial> <solution> <lin-log graph> (Friday May 3rd - No Lesson ) Wk 10 – Test 2 (Friday May 10th) <arrangement><question & solution><marks> Wk 11 – PID Controller and Tuning <notes> <tutorial> <solution> Wk 12 – Compensator Design with Root Locus <notes> <tutorial> <solution> Wk 13 - Compensator Design with Bode Plot <notes> <tutorial> Wk 14 – State Space Control <notes> <tutorial> <solution> Wk 15 – Advanced Control Methods <notes> <tutorial: go through video 20, 21, 22> Wk 16 – Test 3 <arrangement> <test> <marks>
Laboratory
Sessions
Marks Allocation 分数分配 <indicative grades>
|
{kind=link}
{kind=link}
{kind=link}
| ©2022 - Dr. Norbert Cheung |